There’s a long-known issue with the LEGO® Education Spike Essential® batteries that if they are left alone for long enough the hub will stop charging them. You will get a blinking orange light on the hub (instead of solid red indicating charging) and the battery will not be charged.
This is especially annoying as many users find the batteries dead out-of-the-box, meaning that a freshly purchased and just unboxed set cannot be put to use. LEGO used to replace the batteries (and pretend it’s not a widespread problem), but the issue can hit you anytime you leave your battery in the hub for prolonged amount of time and sending the dead battery in isn’t always a viable option (especially if you need it for classes next day).
I have managed to ‘revive’ my Spike Essential battery with the following procedure. I cannot guarantee it will work for you, there are multiple reasons why the battery could refuse to charge and this method does not address all of them.
Tools you will need
- A lab power supply with adjustable current limit and adjustable voltage (CC/CV mode). If you don’t know what that is or how to use one, don’t attempt this fix as you could even cause a fire. You have been warned.
- A pair of thin ‘crow foot’ connectors to reach the battery terminals, compatible with your power supply.
- A half-decent multimeter (something accurate would be of great advantage)
The procedure
Remove the battery from the hub.
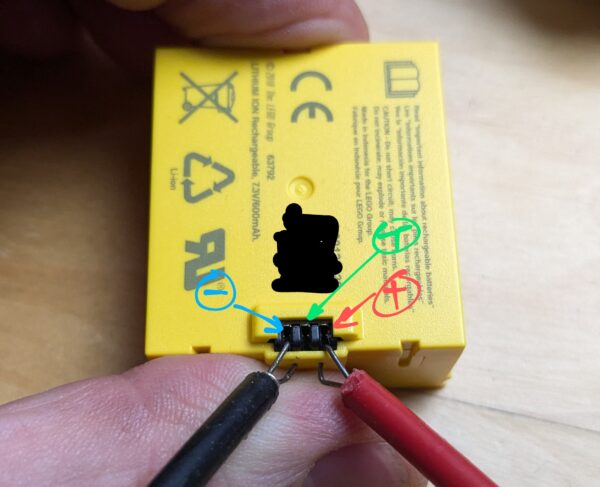
Using your multimeter measure the voltage between the leftmost and rightmost slot on the battery connector (see picture below). You will need needle-point probes or crowfoot clips to reach inside the battery connector. Be careful not to make any short-circuit, the battery won’t like it.
You multimeter should read a voltage above 6V. If it reads less, this procedure will most likely not lead to success. Jump to the bottom of the article to check how to try reviving a battery that’s below 6V.
Adjust your bench lab power supply to 8.3V and 300mA output. No, you cannot use your phone charger or a wall-wart power supply, it HAS to be a lab power supply with a current limiter or you WILL damage the battery. Use your multimeter to make sure the lab power supply actually outputs 8.3V when on and not more. It’s okay if its actual output voltage is below that, this is not critical, just not more.
Connect the power supply as pictured below, red being positive.
Turn the output of the power supply on, the voltage should drop to a little more than your multimeter did read, the current should stay at 300mA. After some time (it may take an hour or more) the voltage should creep up to 8-ish volts, at this point you may disconnect the lab power supply and reinstall the battery in the hub. The hub should charge the battery on its own now.
If it still refuses, you can keep charging the battery on the lab power supply until the voltage rises up to 8.3V and the current drops to below 30-40mA. This may take up to 3 hours. The hub will now naturally not want to charge the battery as it’s considered full, but should be able to run off the battery and allow to recharge it later.
If all this fails, or especially if at the beginning you read a voltage below 5-6V, you may have a battery with a dead cell. Such battery should be replaced.
What can be done with a battery that’s below 6V terminal voltage?
You can try ‘lifting’ such a dead battery by setting the power supply to 6V and 30mA (not 300mA, this is not a typo, just 30mA!) and charging the battery at that rate until the voltage reaches 6V and the current drops to zero. This may take between minutes and hours, bit you should see the vintage rising slowly. If the voltage doesn’t creep up even so slowly, or if there’s no current flowing into the battery at all (the supply stays at 0mA), or if the battery gets warm, the battery is stone dead and needs replacing.
Once the battery reaches 6V and the current guys down to zero (at least to below 5mA) you should disconnect the supply, wait 5 minutes and measure the battery voltage. If it stays at roughly 6V, you have a good chance of reviving the pack. If it drops down again to below 5.5V, don’t go any further, replace the battery, at least one cell has an internal short.
If the battery kept the 6V charge, you can rise the voltage to ca. 7.3V and allow the battery to charge slowly again, still at 30mA. This will take several hours, but you need to be patient and allow for any internal balancing of the battery (I’m not sure there’s one, I hope so) equalise the charge between the full(er) and dead(er) cells.
Once the battery reaches 7.3V it should be able to go on a normal charging routine with 8.3V and 300mA, even the hub might accept it for charging at this point.